

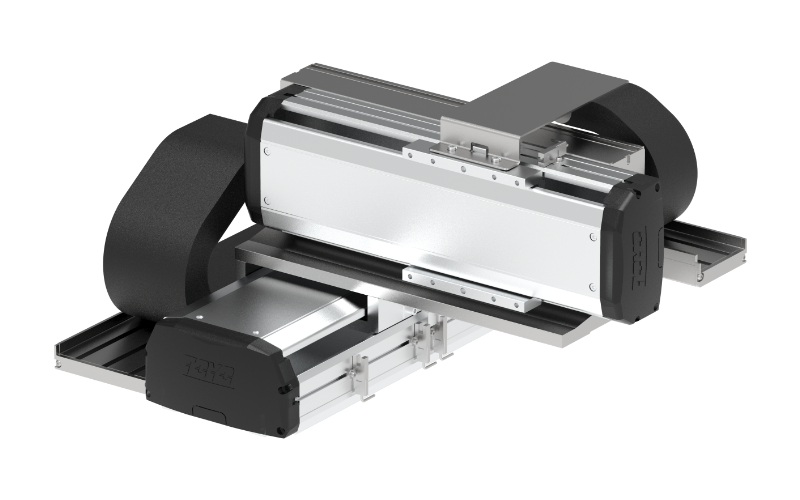
YOSO რექტანგული მოდული 2-ღერძი/3-ღერძიანი კომბინაცია საშუალებას წვდომას იწვევს დიზაინის და მონტაჟის დროს საკმარისი გამოკლებისთვის
-X ღერძი (ETH17) - პოზიციის განმეორება: ±0.005(mm)
Ვლერფასტი: 20(mm)
Მაქსიმალური სიჩქარე: 1000(mm/წმ) სტანდარტული ეფექტიური განშლა: 100-1250/50 (mm)
AC სერვომოტორის მოცულობა: 400 W - Y ღერძი (ETH14) - პოზიციის განმეორებადობის ზუსტობა: ±0.005(მმ)
Ვლერფასტი: 20(mm)
Მაქსიმალური სიჩქარე: 1000(მმ/წმ) სტანდარტული ეფექტიური ხარჯი: 50-500(მმ)
(50 ინტერვალი) შესაბამისი მოტორის მოცულობა: 200W * მაქსიმალური სიჩქარე (მმ/წმ)
Ის დაყრდნობა სერვომოტორის მაქსიმალურ სიჩქარეზე 3000rpm/წმ.
-X ღერძი (ETH17) - პოზიციის განმეორება: ±0.005(mm)
Ვლერფასტი: 20(mm)
Მაქსიმალური სიჩქარე: 1000(mm/წმ) სტანდარტული ეფექტიური განშლა: 100-1250/50 (mm)
AC სერვომოტორის მოცულობა: 400W - Z ღერძი (ETH14) - პოზიციის განმეორებადობის ზუსტობა: ±0.005(მმ)
Ველის ნაბიჯი: 10(მმ)
Მაქსიმალური სიჩქარე: 500(მმ/წმ) სტანდარტული ეფექტიური ხარჯი: 50-500(მმ)
(50 ინტერვალი) შესაბამისი მოტორის მოცულობა: 400+ფრენი * მაქსიმალური სიჩქარე (მმ/წმ)
Ის დაყრდნობა სერვომოტორის მაქსიმალურ სიჩქარეზე 3000rpm/წმ.
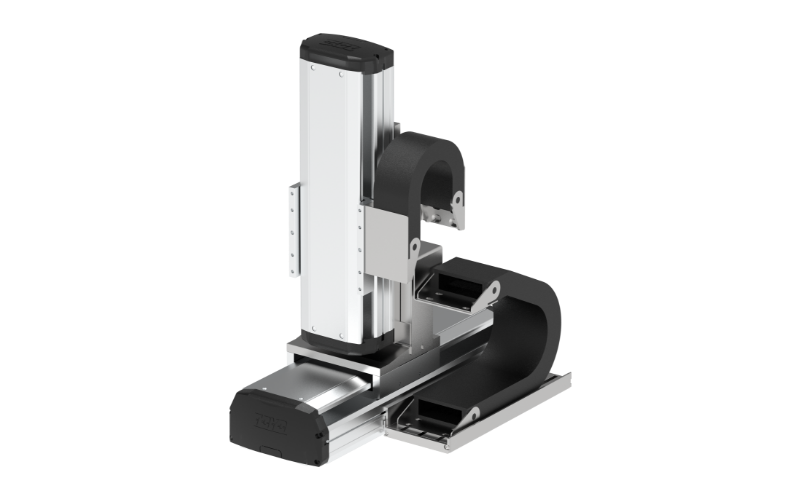
-X ღერძი (ETH22)- პოზიციის განმეორებადობის ზუსტობა: ±0.005(მმ)
Ველის ნაბიჯი: 25(მმ)
Მაქსიმალური სიჩქარე: 1250 (მმ/წ) სტანდარტული ეფექტიური გასწვრივი: 100-1500/50 (მმ)
AC სერვომოტორის მოცულობა: 750W Y-ღერძი (ETH14) პოზიციის განმეორება: ±0.005 (მმ)
Ველის ნაბიჯი: 10(მმ)
Მაქსიმალური სიჩქარე: 500(მმ/წ) სტანდარტული ეფექტიური გასწვრივი: 50-650/50 (მმ)
AC სერვომოტორის მოცულობა: 400W -Z ღერძი (ETH22) - პოზიციის განმეორების ზუსტება: ±0.005(მმ)
Სკრუს ლიდი: 5(მმ)
Მაქსიმალური სიჩქარე: 250(მმ/წ) სტანდარტული ეფექტიური გასწვრივი: 50-950(მმ)
(50 ინტერვალი) შესაბამისი მოტორის მოცულობა: 750+ფრენი * მაქსიმალური სიჩქარე (მმ/წ)
Ის დაყრდნობა სერვომოტორის მაქსიმალურ სიჩქარეზე 3000rpm/წმ.
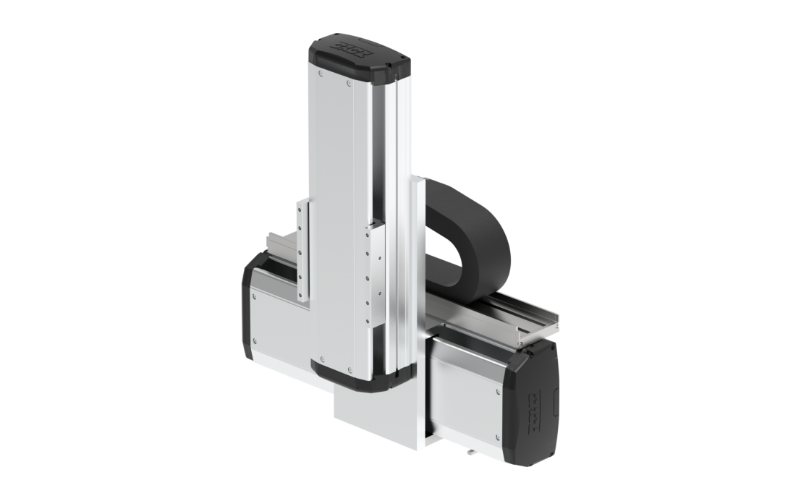
-X ღერძი (ETH22)- პოზიციის განმეორებადობის ზუსტობა: ±0.005(მმ)
Ველის ნაბიჯი: 25(მმ)
Მაქსიმალური სიჩქარე: 1250 (მმ/წ) სტანდარტული ეფექტიური გასწვრივი: 100-1500/50 (მმ)
AC სერვომოტორის მოცულობა: 750W -Z ღერძი (ETH22) - პოზიციის განმეორების ზუსტება: ±0.005(მმ)
Სკრუს ლიდი: 5(მმ)
Მაქსიმალური სიჩქარე: 250(მმ/წ) სტანდარტული ეფექტიური გასწვრივი: 50-900(მმ)
(50 ინტერვალი) შესაბამისი მოტორის მოცულობა: 750+ფრენი * მაქსიმალური სიჩქარე (მმ/წ)
Ის დაყრდნობა სერვომოტორის მაქსიმალურ სიჩქარეზე 3000rpm/წმ.
-X ღერძი (ETH17) - პოზიციის განმეორება: ±0.005(mm)
Ვლერფასტი: 20(mm)
Მაქსიმალური სიჩქარე: 1000(mm/წმ) სტანდარტული ეფექტიური განშლა: 100-1250/50 (mm)
AC სერვომოტორის მოცულობა: 100W -Z ღერძი (ETH14) - პოზიციის განმეორების ზუსტება: ±0.005(მმ)
Ველის ნაბიჯი: 10(მმ)
Მაქსიმალური სიჩქარე: 500(მმ/წმ) სტანდარტული ეფექტიური ხარჯი: 50-500(მმ)
(50 ინტერვალი) შესაბამისი მოტორის მოცულობა: 400+ფრენი * მაქსიმალური სიჩქარე (მმ/წმ)
Ის დაყრდნობა სერვომოტორის მაქსიმალურ სიჩქარეზე 3000rpm/წმ.

-X ღერძი (ETH14) - პოზიციის განმეორებადობის ზუსტება: ±0.005(მმ)
Ვლერფასტი: 20(mm)
Მაქსიმალური სიჩქარე: 1000(მმ/წმ) სტანდარტული ეფექტური ხანგრძლივობა: 100-1050/50 (მმ)
AC სერვომოტორის მოცულობა: 400W -Z ღერძი (ETH13) - პოზიციის განმეორებადობის ზუსტება: ±0.005(მმ)
Ველის ნაბიჯი: 10(მმ)
Მაქსიმალური სიჩქარე: 500(მმ/წმ) სტანდარტული ეფექტური ხანგრძლივობა: 50-550(მმ)
(50 ინტერვალი) შესაბამისი მოტორის მოცულობა: 200+ფრენი * მაქსიმალური სიჩქარე (მმ/წმ)
Ის დაყრდნობა სერვომოტორის მაქსიმალურ სიჩქარეზე 3000rpm/წმ.
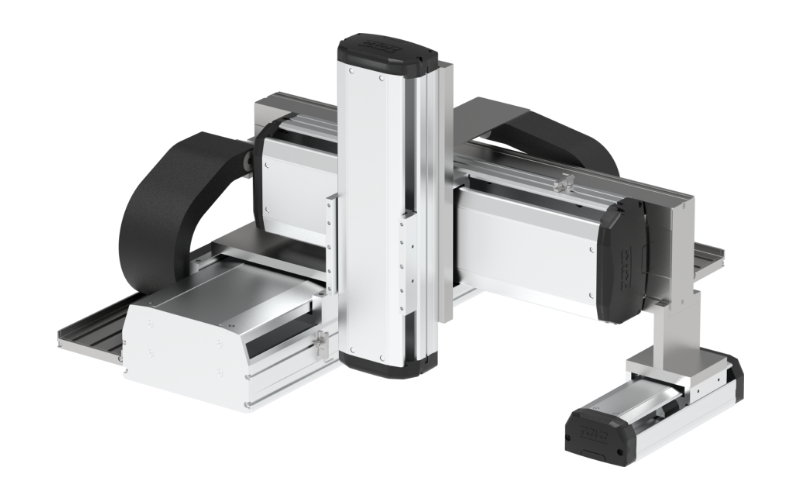
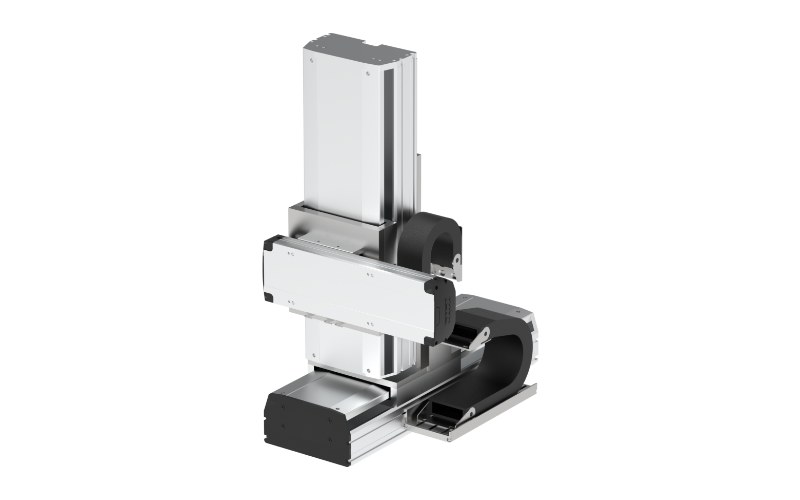
-X ღერძი (ETH22)- პოზიციის განმეორებადობის ზუსტობა: ±0.005(მმ)
Ველის ნაბიჯი: 25(მმ)
Მაქსიმალური სიჩქარე: 1250 (მმ/წ) სტანდარტული ეფექტიური გასწვრივი: 100-1500/50 (მმ)
AC სერვომოტორის მოცულობა: 750W -Y ღერძი (ETH17) - პოზიციის განმეორებადობის ზუსტება: ±0.005(მმ)
Ვლერფასტი: 20(mm)
Მაქსიმალური სიჩქარე: 1000(მმ/წმ) სტანდარტული ეფექტური ხანგრძლივობა: 200-1050(მმ)
(50 ინტერვალი) შესაბამისი მოტორის მოცულობა: 400W -Z ღერძი (ETH14) პოზიციის განმეორებადობის ზუსტება: ±0.005 (მმ)
Ველის ნაბიჯი: 10(მმ)
Მაქსიმალური სიჩქარე: 500(მმ/წმ) სტანდარტული ეფექტური ხანგრძლივობა: 500-50/50 (მმ)
AC სერვომოტორის მოცულობა: 400 + ფრენი * მაქსიმალური სიჩქარე (მმ/წმ)
Ის დაყრდნობა სერვომოტორის მაქსიმალურ სიჩქარეზე 3000rpm/წმ.
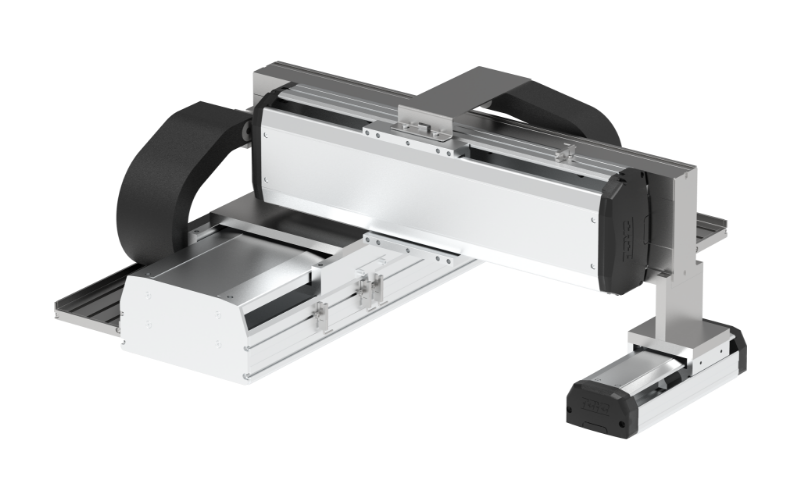
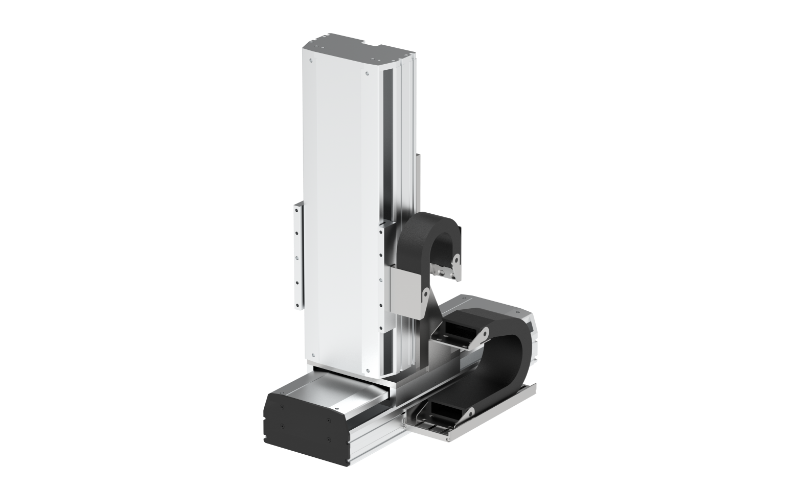
-X ღერძი (ETH22)- პოზიციის განმეორებადობის ზუსტობა: ±0.005(მმ)
Ველის ნაბიჯი: 25(მმ)
Მაქსიმალური სიჩქარე: 1250 (მმ/წ) სტანდარტული ეფექტიური გასწვრივი: 100-1500/50 (მმ)
AC სერვომოტორის მოცულობა: 750W -Y ღერძი (ETH17) - პოზიციის განმეორებადობის ზუსტება: ±0.005(მმ)
Ვლერფასტი: 20(mm)
Მაქსიმალური სიჩქარე: 1000(მმ/წმ) სტანდარტული ეფექტური ხანგრძლივობა: 200-1050(მმ)
(50 ინტერვალი) შესაბამისი მოტორის მოცულობა: 400W * მაქსიმალური სიჩქარე (mm/s)
Ის დაყრდნობა სერვომოტორის მაქსიმალურ სიჩქარეზე 3000rpm/წმ.
Გამოწერეთ ჩვენი ინფორმაციული ბიულეტენი ახალებისა და განახლებების მიერ
Შანხაი, ჩინეთი
YOSOmachinery
COPYRIGHT © JINGPENG MACHINERY&Equipment (Shanghai) Co., Ltd. ყველა უფლება დაცულია
 EN
EN
 AR
AR
 BG
BG
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 ID
ID
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 SW
SW
 GA
GA
 CY
CY
 BE
BE
 KA
KA
 LA
LA
 MY
MY
 TG
TG
 UZ
UZ


