


Მეთოდი ინსტალირებისა უფრო განვითარებულია. გარში მძივე სლაიდი მოძრაობს არკის ზედაპირზე.
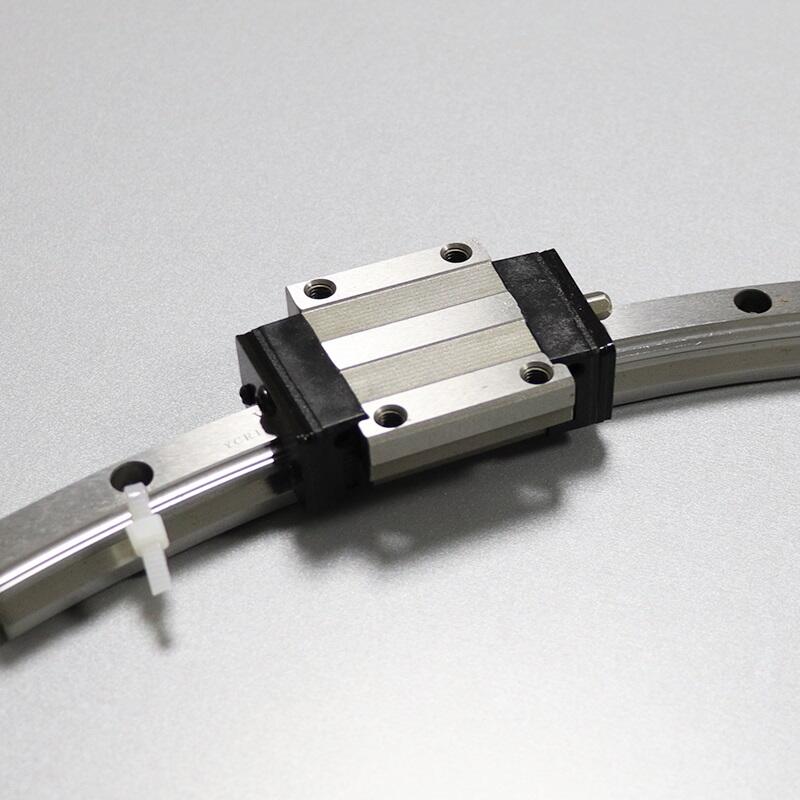
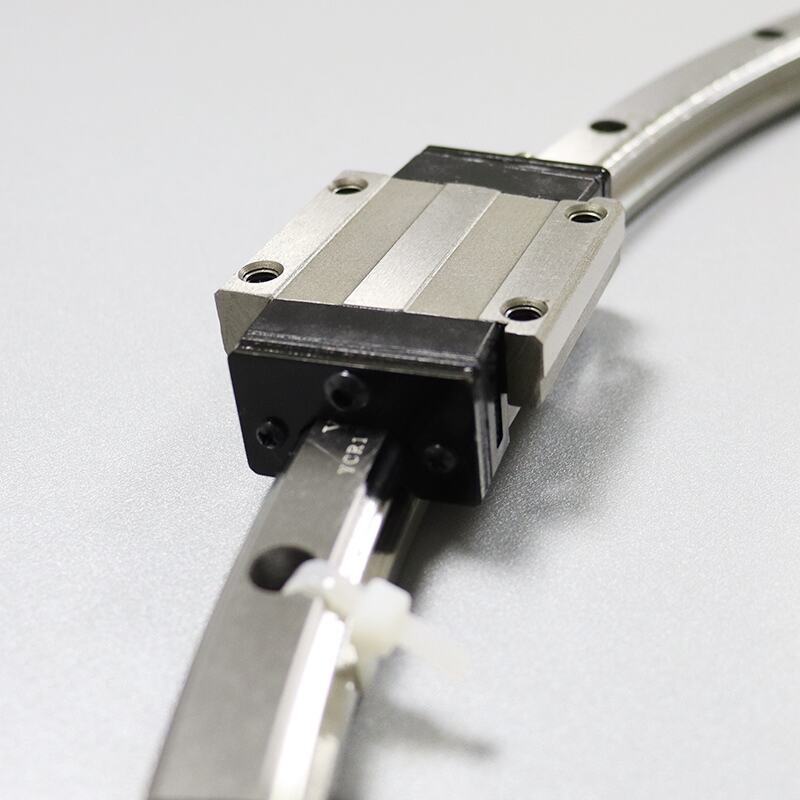
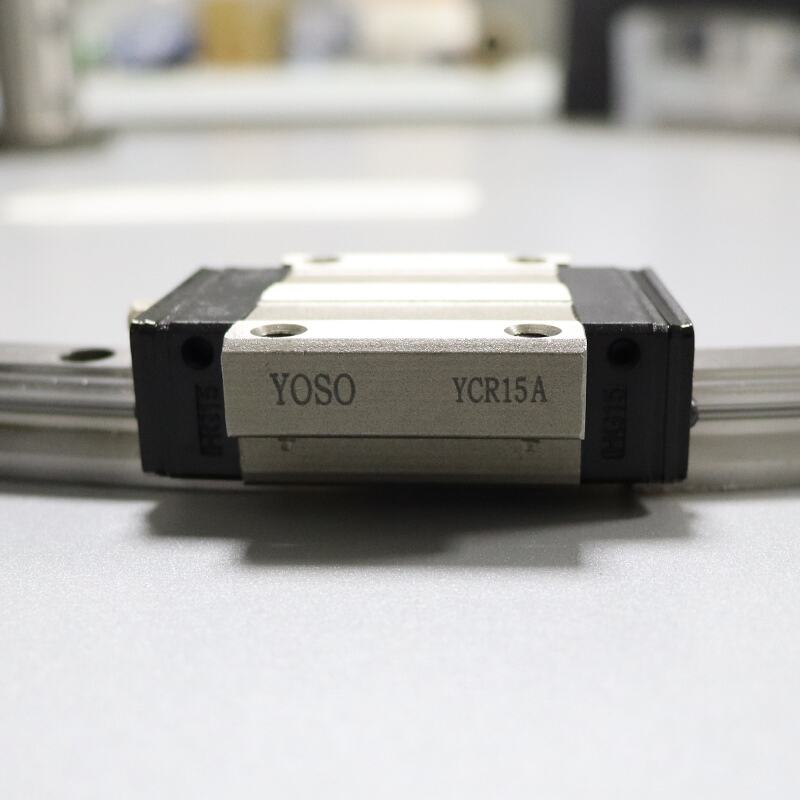
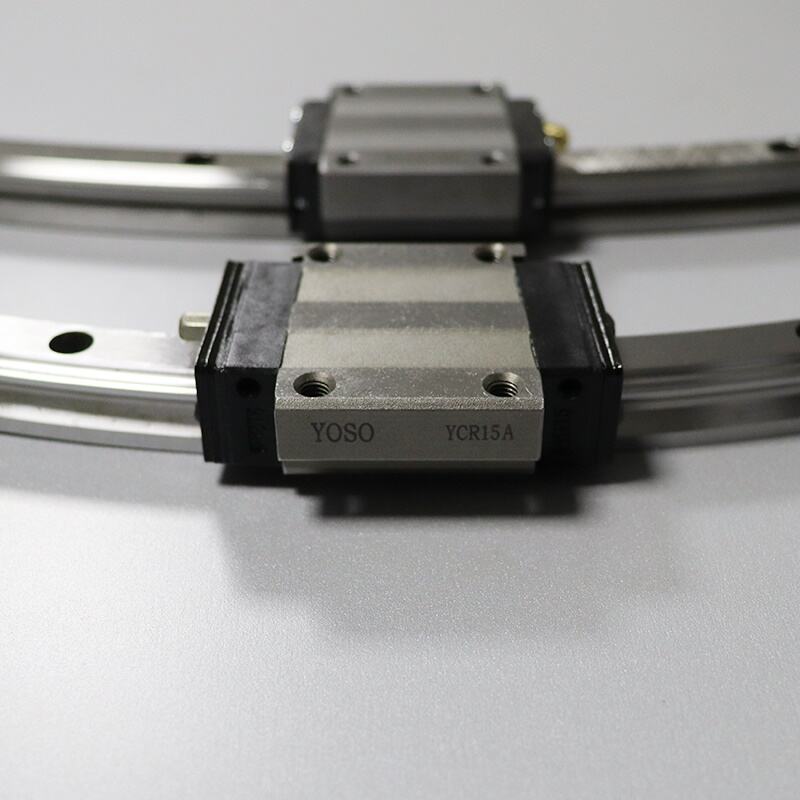
YOSO Circular Guide Rail Series
Არქული ლინიური სახელმძღვანელო აქვს რგოლის ტიპის ლინიური სახელმძღვანელო რელსები და ბურთულის ტიპის ლინიური სახელმძღვანელო რელსები. შეუძლია შექმნას ზუსტი ბეჭდის სახელმძღვანელო რელსები; მამოძრავებელ სისტემასთან ერთად, მას შეუძლია შექმნას ზუსტი ბეჭდის ეს სახის გამშვები გზების მიმოქცევა ხაზები,უფრო კომპაქტური სტრუქტურა,მაღალი პოზიციონირების სიზუსტე,უფრო კონფიგურაციის ვარიანტები; ბევრ შემთხვევაში,ეს აჯობებს ტრადიციულ მიწოდების ხაზებს.
Თანამედროვე საწარმოო ქარხნები, ყოველთვის მუდმივად ეძებენ გზებს, რათა შეამცირონ წარმოების ხარჯები, ავტომატიზაციის მიმართულება არის: დააყენეთ თითოეული სადგური ერთმანეთთან რაც შეიძლება ახლოს, შეამციროთ სამუშაო ნაჭერი სადგურებს შორის მანძილზე და
Ტრადიციული სარტყლის ტიპი
Ტრანსპორტერის ხაზი, ეს არის საპასუხო მართლივი სტრუქტურა, გაფართოებული ტრანსპორტერის ტყე ჩრდილოეთით ორ როლერს შორის განსაკუთრებული მოცული მანძილით, როლერის როტაცია, ტრანსპორტერის ტყის მოძრაობა, განსაკუთრებული ნაწილი ტყეზე მოძრაობს. როლერის ტრანსპორტერის ხაზი და ტრანსპორტერის ხაზი, პრინციპი მათ მსგავსია, გარდა იმით, რომ ტყე ჩანაცვლებულია რაოდენობით სიმღერით.
Გარემოს გარეშე ცირკულაციული ხაზი, სამუშაო ნაწილი დაყოფილია ტასში ან როლებზე, რომელიც არ არის მაღალი მდგომარეობის, რომელიც წარმოადგენს თяლის წნევის წინააღმდეგობას და არ შეძლებს კარგად შეზღუდას სამუშაო ნაწილის მარჯვნივ და მარცხნივ, წინა და უკან და ზედა მოძრაობას. სამუშაო ნაწილის გამოსვლის პრევენციად, აუცილებელია დამატებული ბარიერი ტასის ან გომის ორივე მხარეს. რადგან სამუშაო ნაწილი არ არის დაყოფილი ტასში ან როლებზე, სამუშაო ნაწილი ხშირად ვიბრირებს; თუ სამუშაო ნაწილის ფორმა უფრო სარტყულია, ის ხშირად ჩაიჭრება ტრანსპორტირების ხაზის ნაწილებთან. წნევის წინააღმდეგობის გამო სამუშაო ნაწილის დაყოფა ტრანსპორტირების ხაზზე, არ უზრუნველყოფს კარგი პოზიციონირების ზუსტობას, უფრო არ შეძლებს ტრანსპორტირების ხაზს ზედა მდგომარეობაში დაყოფას. დაყოფილია
სამუშაო ნაწილი არ არის მაღალი მდგომარეობის, რაც შეზღუდავს ტრანსპორტირების ხაზის მოძრაობის სიჩქარეს.
Მუშაობის ნაწილი დაკავებულია სხივის სიტყვეზე, სხივის სიტყვე გადართვის საშუალებით გადარჩენილია სასწორეზე, სასწორე ძალებს ძალიან კარგად შეზღუდავს სხივის სიტყვის თავისუფალებას, მხოლოდ ერთი მოძრაობის მიმართულებაა. ამიტომ, სასწორის ტიპის გარი, უფასო სიჩქარეთან, უფასო პოზიციონირების ზუსტებით, ეს ორი მახასიათებელი მოთხობს ზუსტი ავტომატიზაციის მოთხოვნებს.
Ჯამში, როდესაც საჭიროა მცირე სივრცეში განხორციელებული ზუსტი ავტომატიზაცია: მუშაობის ნაწილი სწრაფად გადავიდეს სამუშაო სადგურებს შორის; მოძრაობის შეჩერების შემდეგ, მუშაობის ნაწილს ჰქონდეს კარგი პოზიციის ზუსტება; მოძრაობის შეჩერების შემდეგ, დამატებითი ძალა შეიძლება გამოიყენოს მუშაობის ნაწილზე გადასამუშავებლად ან შესადგენად; მაშინ შეგიძლია აირჩიო ზუსტი სასწორი როგორც ფუნდამენტი თвоი სასწორის დიზაინისთვის.
Არის ორი ძირითადი გზა სასწორის გამოყენებისთვის სასწორის ხაზისთვის: სველის ფორმა და კვადრატი:


Არკის ლინეარული გამზ Gaussian, რომელიც შედგება გარემოს სისტემასთან, ხდება ანულარ შესავალი. ამჟამად, არსებობს სამი ძირითადი გადასაწყვეტადი რეჟიმი: ჯაჭვის ტიპი, სინქრონული ზოლის ტიპი და სკრიუს ტიპი:


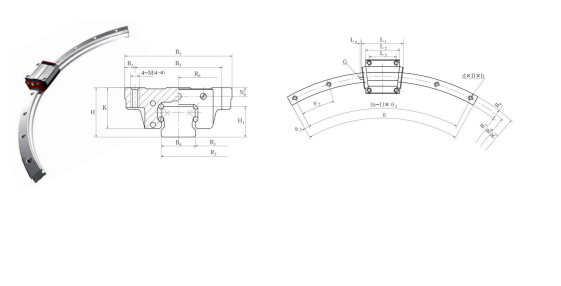
| Მოდელი | Რეილის ზომა | Სლაიდერის ზომა | Ოილ ჩემპის ზომა | ||||||||||
| H | B1 | B2 | B3 | Კ | L1 | L2 | L3 | M | ф | L4 | G | N | |
| YCR16/168AA(AB) | 24 | 47 | 4.5 | 38 | 19.4 | 58 | 40.5 | 30 | MS | 4.5 | 7 | M4 | 4 |
| YCR16/228AA(AB) | 24 | 47 | 4.5 | 38 | 19.4 | 58 | 40.5 | 30 | MS | 4.5 | 7 | M4 | 4 |
| YCR16/300AA(AB) | 24 | 47 | 4.5 | 38 | 19.4 | 58 | 40.5 | 30 | MS | 4.5 | 7 | M4 | 4 |
| YCR16/390AA(AB) | 24 | 47 | 4.5 | 38 | 19.4 | 58 | 40.5 | 30 | MS | 4.5 | 7 | M4 | 4 |
| YCR25/230AA(AB) | 36 | 70 | 6.5 | 57 | 28.8 | 79.5 | 59 | 45 | M8 | 7 | 11 | M6 | 6 |
| YCR25/400AA(AB) | 36 | 70 | 6.5 | 57 | 28.8 | 79.5 | 59 | 45 | MB | 7 | 11 | M6 | 6 |
| YCR25\/500AA(AB) | 36 | 70 | 6.5 | 57 | 28.8 | 79.5 | 59 | 45 | M8 | 7 | 11 | M6 | 6 |
| YCR25\/750AA(AB) | 36 | 70 | 6.5 | 57 | 28.8 | 79.5 | 59 | 45 | M8 | 7 | 11 | M6 | 6 |
| YCR25\/1000AA(AB) | 36 | 70 | 6.5 | 57 | 28.8 | 79.5 | 59 | 45 | M8 | 7 | 11 | M6 | 6 |
| YCR35\/600AA(AB) | 48 | 100 | 9 | 82 | 38 | 111 | 81 | 58 | M10 | 11 | 11 | M6 | 8 |
| YCR35\/800AA(AB) | 48 | 100 | 9 | 82 | 38 | 111 | 81 | 58 | M10 | 11 | 11 | M6 | 8 |
| YCR35\/1000AA(AB) | 48 | 100 | 9 | 82 | 38 | 111 | 81 | 58 | M10 | 11 | 11 | M6 | 8 |
| YCR35\/1300AA(AB) | 48 | 100 | 9 | 82 | 38 | 111 | 81 | 58 | M10 | 11 | 11 | M6 | 8 |
| Გამოსვლის რეკომენდაცია | Მინიმალური ბოლო კუთხე | Ნორმატიური დინამიური ბრუნავა | Სტატიკური ნომინალური ბრუნავი | Სტატიკური ნომინალური მომენტი | Გადაცემის წონა kg | Რაილის წონა Kg/მ | Მოდელი | |||||||||
| B4 | H1 | daDuh | θ | R θ | R1 | R2 | θm | θ 1 | C (MN) | (KN) | MA (N-m) | Mb (N·m) | Mc (N-m) | |||
| 16 | 15 | 4.5x7.5x5.3 | 15° | 168 | 160 | 176 | 160° | 3° | 5.67 | 6.35 | 51.8 | 51.8 | 829 | 0.2 | 1.5 | YCR16/16BAA(AB) |
| 16 | 15 | 45x7.5x5.3 | 15° | 228 | 220 | 236 | 160° | 3° | 5.67 | 6.35 | 51.8 | 51.8 | 829 | 0.2 | 15 | YCR:16/228AA(AB) |
| 16 | 15 | 45x7.5x5.3 | 15° | 300 | 292 | 30g | 75° | 2° | 5.67 | 6.35 | 51.8 | 51.8 | 829 | 0.2 | 1.5 | VCR16/30GAA(AB) |
| 16 | 15 | 4.5x7.5x5.3 | 15 | 390 | 382 | 398 | 65° | 2° | 5.67 | 6.35 | 51.8 | 51.8 | 829 | 0.2 | 1.5 | YCR 16/39GAA(AB) |
| 23 | 22 | 7x11x9 | 15° | 230 | 218.5 | 241.5 | 160° | 3° | 16.8 | 21.5 | 142.2 | 142.2 | 233.5 | 0.59 | 3.3 | YCR25/23GAA(AB) |
| 23 | 22 | 7x11x9 | 10° | 400 | 388.5 | 411.5 | 60° | 2° | 16.8 | 21.5 | 142.2 | 1422 | 233.5 | 0.99 | 3.3 | YCR25/40GAA(AB) |
| 23 | 22 | 7x11x | 7° | 500 | 488.5 | 511.5 | 60° | 2° | 168 | 21.5 | 142.2 | 1422 | 233.5 | 0.99 | 3.3 | YCR25/SOGAA(AB) |
| 23 | 22 | 7x11x9 | 5* | 750 | 738.5 | 751.5 | 35° | 2° | 16.8 | 21.5 | 142.2 | 142.2 | 233.5 | 0.99 | 3.3 | YCR25/75GAA(AB) |
| 23 | 22 | 7x11x | 4° | 10:00 | 988.5 | 1011.5 | 28° | 2° | 16.8 | 21.5 | 142.2 | 1422 | 233.5 | 0.99 | 33 | YCR25/1000A.A(AB) |
| 34 | 29 | 9x14x12 | 9" | 600 | 583 | 617 | 60° | 2° | 3497 | 58.53 | 610 | 610 | 1030 | 1.4 | 6.5 | YCR 3S/SOGAA(AB) |
| 34 | 29 | 9x14x12 | 5.5 | 800 | 783 | 817 | 35° | 2* | 34.97 | 58.53 | 610 | 610 | 1030 | 1.4 | 6.5 | VCR 35/BOGAA(AB) |
| 34 | 29 | 9x14x12 | 5° | 1000 | 983 | 1017 | 28* | 2* | 34.97 | 58.53 | 610 | 610 | 1030 | 1.4 | 65 | YCR3S/1000AA(AB) |
| 34 | 29 | 9x14x12 | 3.5 | 1300 | 1283 | 1317 | 22° | 2* | 34.97 | 58.53 | 610 | 610 | 1030 | 1.4 | 6.5 | YCR35\/1300AA(AB) |

| Მოდელის ნომერი | Გარე ზომები | LM ბლოკის გაზომვები | H3 | ||||||||||
| Სიმაღლე M | Სიგანე W | Სიგრძე L | B | C | S | L1 | T | T1 | N | E | Გრეის ნიპლი | ||
| YCR15A+60/150R | 24 | 47 | 54.5 | 38 | 24 | M5 | 38.8 | 10.3 | 11 | 45 | 5.5 | PB1021B | 4.8 |
| YCR15A+60/300R | 55.5 | 28 | |||||||||||
| YCR15A+60/400R | 55.8 | 28 | |||||||||||
| YCR25A+60/500R | 36 | 70 | 81.6 | 57 | 45 | MB | 59.5 | 149 | 16 | 6 | 12 | B-M6F | 7 |
| YCR25A+60/750R | 82.3 | ||||||||||||
| YCR25A+60/1000R | 82.5 | ||||||||||||
| YCR35A+60/600R | 48 | 100 | 107.2 | 82 | 58 | M10 | 80.4 | 19.9 | 21 | 8 | 12 | B-M6F | 8.5 |
| YCR35A+60/800R | 107.5 | ||||||||||||
| YCR35A+60/1000R | 108.2 | ||||||||||||
| YCR35A+60/1300R | 108.5 | ||||||||||||
| YCR45A+60/800R | 60 | 120 | 136.7 | 100 | 70 | M12 | 98 | 239 | 25 | 10 | 16 | B-PT1/8 | 11.5 |
| YCR45A+60/1000R | 137.3 | ||||||||||||
| YCR45A+60/1200R | 137.3 | ||||||||||||
| YCR45A+60/1600R | 138 | ||||||||||||

| LM რილის გაზომვები | Базიური მოკლე ჩაფართობა | Სტატიკური დозвოლილი მომენტი kN·m | Მასა | ||||||||||||||||||
| R | RO | Ri | LO | U | Ширина W1 | W2 | Სიმაღლე M1 | d1xd2xh | m1 | θ° | θ ° | θ 2 | kN | CO კნ | MA | MB 0 | MC 6 | LM ბლოკი kg | LM Ral kg/მ | ||
| 1 ბლოკი | Дuble ბლოკები | 1 ბლოკი | Дuble ბლოკები | 1 ბლოკი | |||||||||||||||||
| 150 | 157.5 | 142.5 | 150 | 20.1 | 15 | 16 | 15 | 4.5x7.5x5.3 | 3 | 7 | 23 | 6.66 | 10.8 | 0.0805 | 0.457 | 0.080 5 | 0.457 | 0.084 4 | 0.2 | 1.5 | |
| 300 | 307.5 | 2925 | 300 | 40 | 5 | 6 | 12 | 8.33 | 13.5 | ||||||||||||
| 400 | 407.5 | 392.5 | 400 | 54 | 7 | 3 | 9 | 8.33 | 13.5 | ||||||||||||
| 500 | 511.5 | 488.5 | 500 | 67 | 23 | 23.5 | 22 | 7x11x9 | 9 | 2 | 7 | 19.9 | 344 | 0.307 | 1.71 0 | .307 | 1.71 | 0.344 | 0.59 | 3.3 | |
| 750 | 761.5 | 738.5 | 750 | 100 | 12 | 2.5 | 5 | ||||||||||||||
| 1000 | 1011.5 | 988.5 | 1000 | 134 | 15 | 2 | 4 | ||||||||||||||
| 600 | 617 | 583 | 600 | 80 | 34 | 33 | 29 | 9x14x12 | 7 | 3 | 9 | 37.3 | 61.1 | 0.782 | 3.93 0 | .782 | 3.93 | 0.905 | 1.6 | 6.6 | |
| 800 | 817 | 793 | 800 | 107 | 11 | 2.5 | 5.5 | ||||||||||||||
| 1000 | 1017 | 983 | 1000 | 134 | 12 | 2.5 | 5 | ||||||||||||||
| 1300 | 1317 | 1283 | 1300 | 174 | 17 | 2 | 3.5 | ||||||||||||||
| 800 | 822.5 | 777.5 | 800 | 107 | 45 | 37.5 | 38 | 14x20x17 | 8 | 60 | 2 | 8 | 60 | 95.6 | 1.42 | 7.92 | 1.42 | 7.92 | 1.83 | 2.8 | 11.0 |
| 1000 | 1022.5 | 977.5 | 1000 | 134 | 10 | 3 | 6 | ||||||||||||||
| 12.00 | 1222.5 | 1177.5 | 1200 | 161 | 12 | 2.5 | 5 | ||||||||||||||
| 1600 | 1622.5 | 1577.5 | 1600 | 214 | 15 | 2 | 4 | ||||||||||||||
Გამოწერეთ ჩვენი ინფორმაციული ბიულეტენი ახალებისა და განახლებების მიერ
Შანხაი, ჩინეთი
YOSOmachinery
COPYRIGHT © JINGPENG MACHINERY&Equipment (Shanghai) Co., Ltd. ყველა უფლება დაცულია
 EN
EN
 AR
AR
 BG
BG
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 ID
ID
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 SW
SW
 GA
GA
 CY
CY
 BE
BE
 KA
KA
 LA
LA
 MY
MY
 TG
TG
 UZ
UZ
