

MGN12H-0 გამოიყენება რობოტულ ხელებზე
Ადაპტაციის მახასიათებლები: მრავალმიმართული ბრუნავის საშუალება, კომპაქტური ინტეგრაცია
Ტიპიკური სცენარები:
Კოლაბორაციული რობოტის (Cobot) მუხლის გარკვეული
Ზუსტ მოწყობილობის რამის ბოლო ეფექტორის რეილი
Ტექნიკური დახმარება:
Გოთიკური სამუშაო მოწყობილობის დაგეგმვა → გამართლებული მუხლის სინჯის ტორსის გამართვა
Ფლანგის მონტაჟი შეზღუდავს 50% აქსიალურ სივრცე
Პროდუქტის ინფორმაცია | |
Პროდუქტის სახელი |
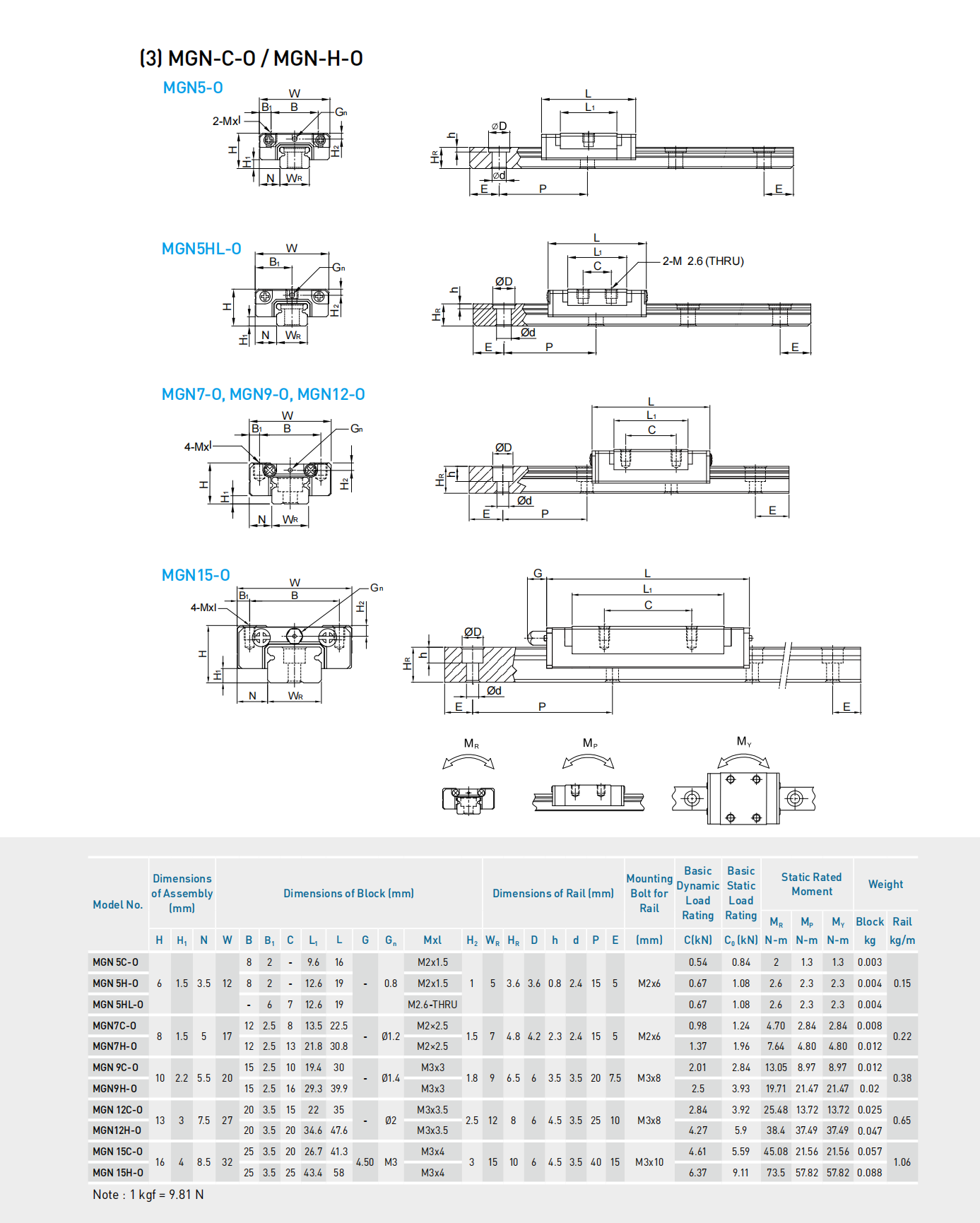
HIWIN MGN12H-0 ლინეარული გიდი |
Მასალა |
სიმიტი |
Სი⚗📐Türkiye |
Პერსონალიზებული |
Მოდელის ნომერი |
MGN5C-0 MGN5H-0 MGN5HL-0 MGN7C-0 MGN7H-0 MGN9C-0 MGN9H-0 MGN12C-0 MGN12H-0 MGN15C-0 MGN15H-0 |
Ჩვენი მომსახურებები |
Ქვეყანაში გამოყენებული ნაკადების ან ნიმუშების მიხედვით ჩვენი გამოყენებლებისთვის პროდუქცია. |
Პროდუქტის გადასამართლებელი |
a. პლასტმასის კუთხი ან ფეროს კასეთით ან ხის კასეთით. Ჩვენ შეგვიძლია მომცემთ მოწოდების ინფორმაცია ჩვენს მომხმარებლს ნებისმიერ დროს. |
Ტიპიკური აპლიკაციის სცენარი |
a. მარტივი ზომვის ინსტრუმენტები b. სემიკონდუქტორული მწარმოებლის მართვის აპარატურა c. მედიცინური აპარატურა d. მცირე ავტომატიზაციის აპარატურა e. ოპტიკური ინსტრუმენტები f. მცირე რობოტის ხელის გაიდინების რეილი / რობოტის კავშირის გაიდინების რეილი |
Გამოწერეთ ჩვენი ინფორმაციული ბიულეტენი ახალებისა და განახლებების მიერ
Შანხაი, ჩინეთი
YOSOmachinery
COPYRIGHT © JINGPENG MACHINERY&Equipment (Shanghai) Co., Ltd. ყველა უფლება დაცულია
 EN
EN
 AR
AR
 BG
BG
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 ID
ID
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 SW
SW
 GA
GA
 CY
CY
 BE
BE
 KA
KA
 LA
LA
 MY
MY
 TG
TG
 UZ
UZ





