Valmistuksen automaatiossa lineaohjeet ja liukupaneeelit ovat tarkan lineaariliikkeen ydin – oikean valinta vaikuttaa suoraan laitteesi tarkkuuteen, vakautta ja käyttöikään. Lukemattomat insinöörit sekoittavat lineaohjeet ja liukupaneeelit toisiinsa ajatellessaan niiden olevan vaihdettavissa keskenään. Mutta lineaohjeilla ja liukupaneeeleillä on merkittäviä eroja rakenteessa, suorituskyvyssä ja käyttötarkoituksissa. Tässä artikkelissa puretaan lineaohjeiden ja liukupaneeleiden keskeiset erot helpottaaksemme valintaa.
I. Oleellinen määritelmä: Liikkeen periaate määrittää ydinerot
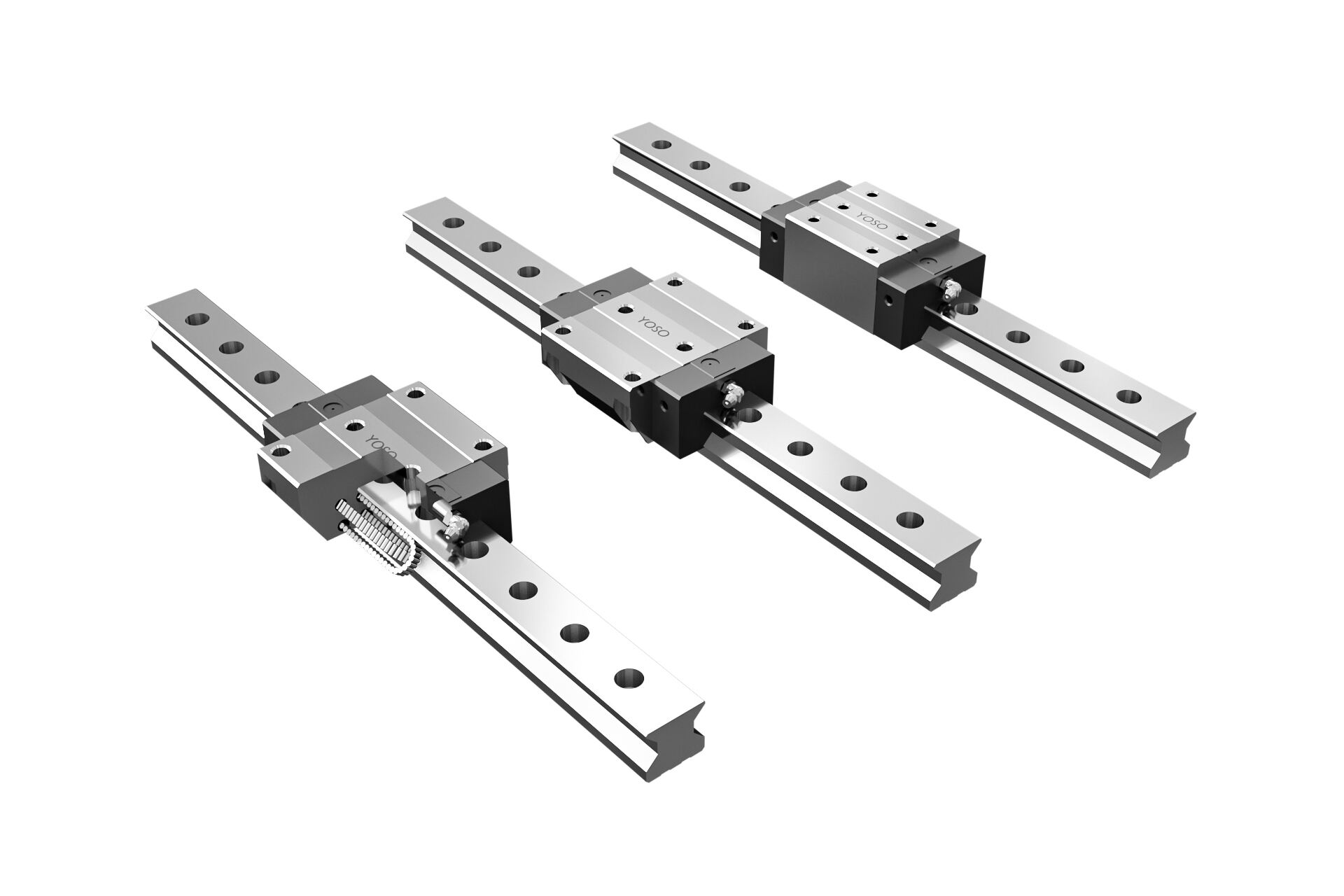
Suoraviivaiset ohjausradat , ovat puolestaan "vierintäkitkä"-liikkeen pari, jotka koostuvat keskeisistä komponenteista, kuten ohjausrailoista, liukureista, teräskuulista ja kääntöosista. Toiminnan aikana liukurin sisällä olevat teräskuulat pyörivät ohjausrailon ja liukurin urien välissä, saavuttaen pyöreän liikkeen kääntöosan kautta. Tämä "liukumisen korvaaminen vierimisellä" -rakenne muuttaa perustavanlaatuisesti kitkamekanismin ja tuo mukanaan laadullisen harppauksen suorituskyvyssä. YOSO MOTIONin tunnetuimpia myydyimpiä tuotteita, kuten SBR12-ympyrälinjaohjattua linjaopastinta ja MGN-mikrolineaarista opastinta, kuuluvat kaikki lineaariopastimien luokkaan.
Liukukoot kuuluvat "pintakosketuksen" kinemaattisiin pareihin. Rakenteessa on yleensä kiinteä opaste (liukurailo) ja liikkuva opaste (liukupala), ja lineaariliike saavutetaan suoralla liukumisella kahden pinnan kosketuspinnan välillä. Kitkan vähentämiseksi kosketuspintojen väliin lisätään voiteluöljyä, ja joissakin korkean tason malleissa on öljyura öljyn varastointia varten. Tämä rakenne on perinteisin opasterakenne, jota on käytetty laajalti alusta lähtien koneenrakennusteollisuudessa.


Tämä vierintäkitkamuotoilu vähentää energiahukkaa ja säilyttää liikkeen tarkan tarkkuuden – miksi lineaariopasteet ovat olennaisia korkean tarkkuuden automaatiojärjestelmissä. YOSO MOTIONin SBR- ja YGH-sarjat ovat saaneet kansainvälistä tunnustusta tämän teknologian hyödyntämisestä, ja niiden toiminta on osoitettu elektroniikka- ja autoteollisuuden laitoksissa.
2. Kanto-ominaisuudet: Kummallakin on omat etunsa, sopeutuen erilaisiin tilanteisiin
Jokainen ohjausjärjestelmä loistaa tietyissä kuormitustilanteissa. Liukupintojen pinta kosketuksessa jakaa suuret staattiset kuormat/iskut (esim. raskaiden koneiden kantoja) tasaisesti—lineaariohjaimissa teräspallot voivat halkeilla tässä tilanteessa.
YOSO SBR -liukuoikeat

Tämä kuorman jakautuminen takaa luotettavuuden. Kaivostomintaa käytti liukuoikaita 10 tonnin staattisiin kuljetinkuormiin; automatisoidut logistiikkasihteet suosivat lineaariohjaimia sulavassa dynaamisen kuorman käsittelyssä (palletit, robottikäsivarret).
Lineaariohjaimet soveltuvat erinomaisesti dynaamisiin/säteittäisiin kuormiin, jolloin teräspallot jakavat painon laakeriratojen yli. Vältä raskaita iskuja (pallojen halkeamisvaara). Käytä lineaariohjaimia keskivartalollisissa, korkean taajuuden sovelluksissa; liukuoikaita raskasrasitteisissa, matalanopeussovelluksissa.
3. Huoltokustannukset: Lineaariohjaimet ovat huolittomampia
Liukuoikailta tulee paljon kulumista, vaativat kuukausittaista voitelua ja puhdistusta (erityisen tärkeää lastun aiheuttamissa tiloissa). Huollon laiminlyönti johtaa lukkiutumiseen, mikä aiheuttaa kokonaisten työvuorojen katkeytyminen.
Lineaarisuuntien vierintäkitka vähentää kulumista. YOSO MOTIONin tiiviit, itselubrikoivat ratkaisut kestävät pölyä (todistettu PCB-tehtaissa) 6–12 kuukauden huoltoväleillä – käyttökatkojen säästöt perustellusti oikeuttavat käytön jatkuvatoimisilla linjoilla.
4. Asennuksen vaikeus: Lineaarisuunnit ovat helpompia standardoituun asennukseen
Liukusuunnit vaativat tarkan paikkakunnossa tehtävän raapimistyön tasomaisille kosketuspinnalle – päivien mittainen erikoistyö. Huono sovitus aiheuttaa nopean kulamisen ja tarkkuuden menetyksen; ei sopiva aloittelijoille.
Lineaarisuuntien modulaarinen rakenne yksinkertaistaa asennusta: kohdista kiskot, kiinnitä ruuveilla – ei tarvetta tarkalle paikkakunnassa tehtävälle työlle. Harjoittelijat oppivat sen tunnissa. Tämä helppous lisää YOSO MOTIONin suosiota.
Valintaguide: 3 askelta oikean suuntauksen löytämiseksi
Oikean suuntauksen valinta perustuu kolmeen käytännön vaiheeseen:
YOSO MOTION: Suuntauksen valinta on teollisen uudistamisen pienoismalli
Opasvalinta heijastaa teollisuuden siirtymää tarkkaan automaatioon. Lineaarituki hallitsee tätä suuntausta – YOSO MOTION hallitsee lähes 70 % Alibaban myydyimmistä tuotteista tarjoamalla valmiiksi käyttöön soveltuvaa suorituskykyä.
Ei ole olemassa "parempaa" opasta – vain oikea sopivuus. Tämä katsaus yksinkertaistaa valintaa. Jätä kommentti tietyillä malleilla tai käyttötarkoituksilla saadaksesi henkilökohtaista neuvoa.
B{Selvennä ydinvaatimukset}\n B -->|Korkea tarkkuus/Suurtaajuusliike/Vähäinen huoltotarve| C[Liukujohteiden priorisointi]\n B -->|Yksinkertaiset laitteet/Raskaat kuormat/Hidas nopeus/Rajoitettu budjetti| D[Liukujohteiden priorisointi]\n C --> E{Sovita sovellusskenaariot}\n D --> E\n E -->|Tarkkuuskoneistus/Elektroniikka/Robotiikka| F[Vahvista lineaarijohteet]\n E -->|Raskaat työstökoneet/Manuaaliset laitteet| G[Liukujohteiden vahvistus]\n F --> H{Laske kokonaiskustannukset}\n G --> H\n H -->|Pitkäaikainen käyttö/Korkea automaatio| I[Lopullinen valinta: Lineaarijohteet]\n H -->|Lyhytaikainen käyttö/Kertaprojekti| J[Lopullinen valinta: Liukujohteet]\n I --> K[Valinta valmis]\n J --> K","teema":"oletus","näkymä":"kaavio"}},"DC2vfHL4KdRHOlcvrtocuDFVnrf":{"id":"DC2vfHL4KdRHOlcvrtocuDFVnrf","snapshot":{"align":"","author":"3710198389154762","lapset":["MacbfaYs9dkhp0cqKOGcwY1qnSh","WKnYfULajduRJHcUoHtc1ormnBh","NZYHf3BAcdoXonctaBIcHkIanoy", "OMSZfXeHhd15JLcIzT4cgQElnkf", "FE5sf7a9ydJOmjcEkvtcIZvMn2H", "JJe0fDKBXdLBWpclH0ecNwNDnLb", "KLf0flTwidAzMucJfpUcqTEFnmc", "WIVKfjuLudyYIVcKv9YcNnZKnKb", "SR9ffi9yxdrve2cupgXcxf7pnzh", "EHkTfSVWmdjZeycvY4rc6odNnpf", "SFuFf1ro8dZbktclz7pcfK5Znsf", "OfHqfd5U4dgqJYcD OvLccnffnSg", "FZljfZCxUdRQP7ctLgUcJuf1nNS", "OWR7f0zTDdEkUocXGOIcw7cWnZe", "VkAmfqr95d55chcuvebc97onnUd", "EmlqfrYWQdCHqBcpnYucQyAFntd", "Uip9fYJ2od4qtpcLSzJc0O9ynxc", "CRWEfwc4LdPC9HcGcMic4b80nse", "Q7zOfzHrGdp2Rjc5Ia5cY5lhnMf", "Xmv0f7Setdwruhcl2yncq09VnMe", "ZA5 KfeyeBdo7QUcGQCtcax2bnwf", "Q25vf1gaGdD79CcKKUAcojwYnxg", "VGtRfDISWdSqCqcN9I3cySZknqf", "Bw4SfdZbHdRZbOcjLUIcSzKUn9b", "XIrMfZuIddMbrTcvu83c9uNYn7b", "SIuKfN0c4dfHSycRCqscl3wZnrc", "IGmOfuCT3dvDyLc9gYwcJ8O4n1g", "LwuBfMnDkdq7xdcXqbQcJqh5nAb", "M9dZfFFThdZwjwcGO4Sc fVX8nac", "UQ33f4mRfdJisScC8frcDLMknYe", "S3i4fcQ8md0KCyc2KZ7c0twzn3f", "EVeofzMrZdeXd1cmatic1VVOnle", "Bb20fQx2Xd7h5IcF30ucXdLJnFo", "ICkYfdKTWdnsKicEOlvcGKTlnWu", "YPvCf30DTdbBDBctd2cclUcXnQb", "KDMkf7pWzdWaPycBEYfcuYNhnud", "NuaJf44lldo7HpcUxEfcwVFCn9f", "MNMFfeC vLdUdkHcl5lJcW9FFnue", "TTxrf9cqtdFZQ7cmueNcYCkWnHg", "NynDfTYtPdSMP9cgMOkc9qLPnSe", "GOWEfdzS2d5GTucHwrzcPEiBnFh", "Ycdufx6H5dNlKgcWboacRdDjnPb", "IHZUf4x3GdLTsJc2cZXcH5JxnEc"], "comment_container_id": "JgBXfu3R4dyGZAcjDnlcgotTnId", "comments":[], "doc_info":{"delete" ted_editors":null,"editors":["3710198389154762"],"option_modified":null,"options":["editors","create_time","edit_time"]},"hidden":false,"locked":false,"parent_id":"","revision_container_id":"ReS9fMTOEd7tMwcwJ2NcJRRwnRb","revisions":[],"status":{"streaming": {"enabled":false,"expired_at":"1763367228","source":1,"operator_id":"3710198389154762"}},"text":{"apool":{"numToAttrib":{"0":["author","3710198389154762"]},"nextNum":1,"attribToNum":{"author,3710198389154762":0}},"initialAttributedTexts":{"text":{"0":"Lineaarinen Apuviivat vs. liukuvat apuviivat: Keskeiset erot ja valintaopas"},"attribs":{"0":"*0+1v"},"rows":{},"cols":{}},"type":"page"}}},"payloadMap":{},"extra":{"channel":"saas","pasteRandomId":"32903089-f853-4d31-9a39-0d49e0fc81d5","mention_page_title":{},"external_mention_url":{}},"isKeepQuoteContainer":false,"selection":[{"id":54,"type":"block","recordId":"NuaJf44lldo7HpcUxEfcwVFCn9f"}],"pasteFlag":"aa98c37a-1174-4728-be27-dd0ce9c5087d"}">
B{Selvennä ydinvaatimukset}\n B -->|Korkea tarkkuus/Suurtaajuusliike/Vähäinen huoltotarve| C[Liukujohteiden priorisointi]\n B -->|Yksinkertaiset laitteet/Raskaat kuormat/Hidas nopeus/Rajoitettu budjetti| D[Liukujohteiden priorisointi]\n C --> E{Sovita sovellusskenaariot}\n D --> E\n E -->|Tarkkuuskoneistus/Elektroniikka/Robotiikka| F[Vahvista lineaarijohteet]\n E -->|Raskaat työstökoneet/Manuaaliset laitteet| G[Liukujohteiden vahvistus]\n F --> H{Laske kokonaiskustannukset}\n G --> H\n H -->|Pitkäaikainen käyttö/Korkea automaatio| I[Lopullinen valinta: Lineaarijohteet]\n H -->|Lyhytaikainen käyttö/Kertaprojekti| J[Lopullinen valinta: Liukujohteet]\n I --> K[Valinta valmis]\n J --> K","teema":"oletus","näkymä":"kaavio"}},"DC2vfHL4KdRHOlcvrtocuDFVnrf":{"id":"DC2vfHL4KdRHOlcvrtocuDFVnrf","snapshot":{"align":"","author":"3710198389154762","lapset":["MacbfaYs9dkhp0cqKOGcwY1qnSh","WKnYfULajduRJHcUoHtc1ormnBh","NZYHf3BAcdoXonctaBIcHkIanoy", "OMSZfXeHhd15JLcIzT4cgQElnkf", "FE5sf7a9ydJOmjcEkvtcIZvMn2H", "JJe0fDKBXdLBWpclH0ecNwNDnLb", "KLf0flTwidAzMucJfpUcqTEFnmc", "WIVKfjuLudyYIVcKv9YcNnZKnKb", "SR9ffi9yxdrve2cupgXcxf7pnzh", "EHkTfSVWmdjZeycvY4rc6odNnpf", "SFuFf1ro8dZbktclz7pcfK5Znsf", "OfHqfd5U4dgqJYcD OvLccnffnSg", "FZljfZCxUdRQP7ctLgUcJuf1nNS", "OWR7f0zTDdEkUocXGOIcw7cWnZe", "VkAmfqr95d55chcuvebc97onnUd", "EmlqfrYWQdCHqBcpnYucQyAFntd", "Uip9fYJ2od4qtpcLSzJc0O9ynxc", "CRWEfwc4LdPC9HcGcMic4b80nse", "Q7zOfzHrGdp2Rjc5Ia5cY5lhnMf", "Xmv0f7Setdwruhcl2yncq09VnMe", "ZA5 KfeyeBdo7QUcGQCtcax2bnwf", "Q25vf1gaGdD79CcKKUAcojwYnxg", "VGtRfDISWdSqCqcN9I3cySZknqf", "Bw4SfdZbHdRZbOcjLUIcSzKUn9b", "XIrMfZuIddMbrTcvu83c9uNYn7b", "SIuKfN0c4dfHSycRCqscl3wZnrc", "IGmOfuCT3dvDyLc9gYwcJ8O4n1g", "LwuBfMnDkdq7xdcXqbQcJqh5nAb", "M9dZfFFThdZwjwcGO4Sc fVX8nac", "UQ33f4mRfdJisScC8frcDLMknYe", "S3i4fcQ8md0KCyc2KZ7c0twzn3f", "EVeofzMrZdeXd1cmatic1VVOnle", "Bb20fQx2Xd7h5IcF30ucXdLJnFo", "ICkYfdKTWdnsKicEOlvcGKTlnWu", "YPvCf30DTdbBDBctd2cclUcXnQb", "KDMkf7pWzdWaPycBEYfcuYNhnud", "NuaJf44lldo7HpcUxEfcwVFCn9f", "MNMFfeC vLdUdkHcl5lJcW9FFnue", "TTxrf9cqtdFZQ7cmueNcYCkWnHg", "NynDfTYtPdSMP9cgMOkc9qLPnSe", "GOWEfdzS2d5GTucHwrzcPEiBnFh", "Ycdufx6H5dNlKgcWboacRdDjnPb", "IHZUf4x3GdLTsJc2cZXcH5JxnEc"], "comment_container_id": "JgBXfu3R4dyGZAcjDnlcgotTnId", "comments":[], "doc_info":{"delete" ted_editors":null,"editors":["3710198389154762"],"option_modified":null,"options":["editors","create_time","edit_time"]},"hidden":false,"locked":false,"parent_id":"","revision_container_id":"ReS9fMTOEd7tMwcwJ2NcJRRwnRb","revisions":[],"status":{"streaming": {"enabled":false,"expired_at":"1763367228","source":1,"operator_id":"3710198389154762"}},"text":{"apool":{"numToAttrib":{"0":["author","3710198389154762"]},"nextNum":1,"attribToNum":{"author,3710198389154762":0}},"initialAttributedTexts":{"text":{"0":"Lineaarinen Apuviivat vs. liukuvat apuviivat: Keskeiset erot ja valintaopas"},"attribs":{"0":"*0+1v"},"rows":{},"cols":{}},"type":"page"}}},"payloadMap":{},"extra":{"channel":"saas","pasteRandomId":"8134ad9d-2d0a-4c6a-bfdf-76f4fb4939ee","mention_page_title":{},"external_mention_url":{}},"isKeepQuoteContainer":false,"selection":[{"id":54,"type":"block","recordId":"NuaJf44lldo7HpcUxEfcwVFCn9f"}],"pasteFlag":"aa98c37a-1174-4728-be27-dd0ce9c5087d"}">
 EN
EN
 AR
AR
 BG
BG
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 ID
ID
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 SW
SW
 GA
GA
 CY
CY
 BE
BE
 KA
KA
 LA
LA
 MY
MY
 TG
TG
 UZ
UZ