У вытворчай аўтаматызацыі лінейныя кіраўніцы і пасуўныя кіраўніцы з'яўляюцца асновай дакладнага паступальнага руху — выбар патрэбнага віду непасрэдна ўплывае на дакладнасць, стабільнасць і працягласць жыцця вашага абсталявання. Бясконцая колькасць інжынераў перапутвае лінейныя кіраўніцы і пасуўныя кіраўніцы, мяркуючы, што яны ўзаемазаменныя. Але лінейныя кіраўніцы і пасуўныя кіраўніцы кардынальна адрозніваюцца па канструкцыі, характарыстыках і галінах прымянення. У гэтай артыкуле разглядаюцца асноўныя адрозненні паміж лінейнымі і пасуўнымі кіраўніцамі, каб спрасціць вам выбар.
I. Асноўнае вызначэнне: прынцып руху вызначае асноўныя адрозненні
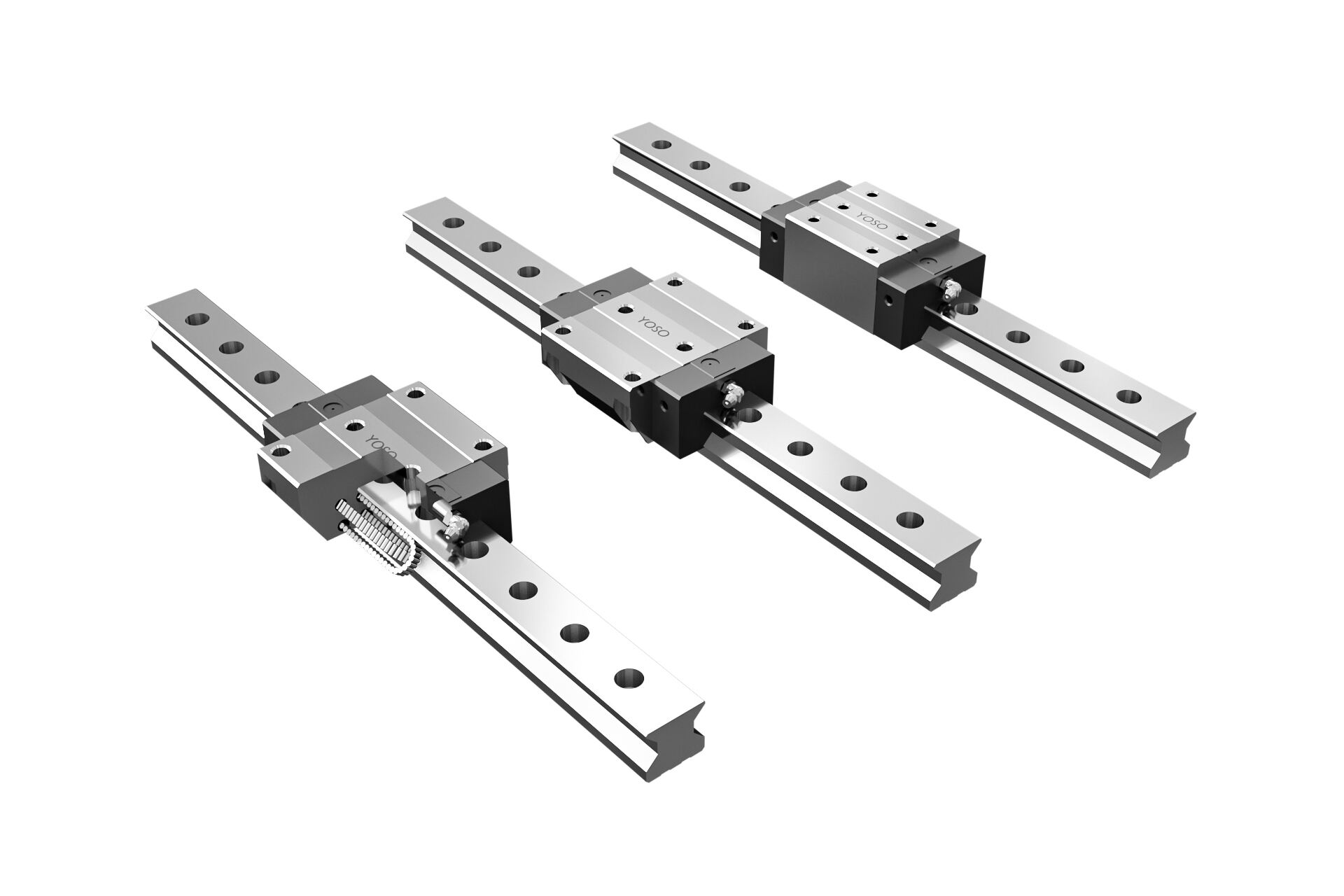
Лінейныя падшипнікі , навадзяць пары кінематыкі "качэння", якія складаюцца з асноўных кампанентаў, такіх як напрамныя рэйкі, паўзункі, сталёвыя шарыкі і рэверсівы. Падчас працы сталёвыя шарыкі ўнутры паўзунка кацяцца паміж бегавымі дарожкамі напрамной рэйкі і паўзунка, дасягаючы цыркулявання праз рэверсіў. Гэты канструктыўны прынцып "замены пракручвання на качэнне" карэнным чынам мяняе механізм тармажэння і забяспечвае якасны скачок у прадукцыйнасці. Да вядомых бестсэлерам YOSO MOTION, такіх як цыркульная лінейная накіроўка SBR12 і мікра лінейная накіроўка MGN, адносяцца ўсе да катэгорыі лінейных накіроўак.
Слізгальныя накіроўкі належаць да кінематычных пар «паверхнасці кантакту». Іх канструкцыя звычайна ўключае нерухомую напрамную (направляючую шыну) і рухомую напрамную (слайд-блок), а лінейны рух дасягаецца за кошт прамога слізгу паміж паверхнямі кантакту абодвух. Для памяншэння тармажэння на паверхні наносяць змацоўвае алей, а некаторыя вышэйшыя мадэлі абсталяваныя алеевымі жолабамі для захоўвання алею. Гэтая канструкцыя з'яўляецца найбольш традыцыйным тыпам напрамных і шырока выкарыстоўваецца з самага пачатку развіцця машынабудаўнічай прамысловасці.


Гэты канструктыўны прынцып з катковым тармазеннем скарачае страта энергіі і забяспечвае сталую дакладнасць руху — менавіта таму лінейныя напрамныя маюць вельмі важнае значэнне для высокадакладнай аўтаматызацыі. Сэрыі SBR і YGH ад YOSO MOTION атрымалі прызнанне па ўсім свеце дзякуючы выкарыстанню гэтай тэхналогіі і паказалі сваю эфектыўнасць на прадпрыемствах электроннай і аўтамабільнай прамысловасці.
2. Нагрузачная здольнасць: кожны мае свае перавагі, прыстасоўваецца да розных сцэнарыяў
Кожны кіруючы элемент добра справляецца з пэўным тыпам нагрузкі. Паверхневы кантакт слайдзячых напрамных дазваляе роўнамерна размерківаць вялікія статычныя нагрузкі ці ўдары (напрыклад, у цяжкіх верстатаў), што прадухіляе пашкоджванне — у лінейных напрамных сталёвыя шарыкі могуць потрывіцца ў такіх выпадках.
YOSO SBR Слайдзячыя напрамныя

Такое размеркаванне нагрузкі забяспечвае надзейнасць. Адзін з кліентаў у галіне здабычы выкарыстаў слайдзячыя напрамныя для 10-тоннай статычнай нагрузкі на транспартэры; кліенты аўтаматызаваных лагістычных сістэм аддаюць перавагу лінейным напрамным для гладкага кіравання дынамічнымі нагрузкаваннямі (палеты, робатызаваныя стралы).
Лінейныя напрамныя ідэальныя для дынамічных/радыяльных нагрузк, пры якіх сталёвыя шарыкі размерківаюць вагу па бегавых дарожках. Уникаюць моцных ударных нагрузк (рызыка разбурэння шарыкаў). Выкарыстоўвайце лінейныя напрамныя для сярэдніх і лёгкіх нагрузк з высокай частатой руху, а слайдзячыя — для цяжкіх нагрузк пры нізкай хуткасці.
3. Выдаткі на тэхнічнае абслугоўванне: лінейныя напрамныя менш праблемныя
Слайдзячыя напрамныя маюць высокі ўзровень зносу, таму патрабуюць месячнай змащвання і чысткі (асабліва важна ў цэхах з вялікай колькасцю апілок). Прапуск абслугоўвання можа прывесці да заклінення, што выкліча простой на поўную змену.
Канічныя раўлярыкі з крочачым тармазеннем мінімізуюць знос. Закрытыя канструкцыі YOSO MOTION з самазванённым алеяннем стойкія да пылу (падцверджана ў цэхах вырабу друкаваных плат) і маюць перыяды абслугоўвання ад 6 да 12 месяцаў — эканомія часу на прастоі апраўдлівае іх выкарыстанне ў сістэмах з кругласутачнай працай.
4. Складанасць устаноўкі: лінейныя правадыры прасцейшыя для стандартизаванай ўстаноўкі
Для плоскіх кантактных паверхняў паслядоўныя правадыры патрабуюць дакладнай ручной апрацоўкі на месцы — гэта займае дні працы спецыяліста. Поганая падгонка прыводзіць да хуткага зносу і страты дакладнасці; не падыходзіць для новаўважаных.
Модульная канструкцыя лінейных правадыраў спрашчае ўстаноўку: выраўняйце напрамныя, замацуйце балтамі — ніякіх дакладных работ на месцы. Навучэнцы валодаюць гэтым за гадзіну. Саме гэтая простата забяспечвае папулярнасць YOSO MOTION.
Кіраўніцтва па выбары: 3 крокі для выбару патрэбнага правадыра
Выбар патрэбнага правадыра засноўваецца на трох практычных кроках:
YOSO MOTION: выбар правадыра — гэта малюнка прамышленнага абнаўлення
Выбар кіраўніцтва адлюстроўвае пераход вытворчасці да дакладнай аўтаматызацыі. Лінейныя напрамкі кіруюць гэтым трэндам — YOSO MOTION займае амаль 70% спісу бестсэлерамі на Alibaba, забяспечваючы прадукцыйнасць, гатовую да выкарыстання ў цэху.
Няма «лепшага» кіраўніцтва — толькі правільны варыянт. Гэта разборка спрашчае выбар. Пакіньце каментар з канкрэтнымі мадэлямі ці прымяненнем для асабістых парадаў.
B{Удакладніць асноўныя патрабаванні}\n B -->|Высокая дакладнасць/Высокачастотны рух/Нізкія эксплуатацыйныя выдаткі| C[Прыярытэт лінейным накіроўвалым]\n B -->|Простае абсталяванне/Цяжкія нагрузкі/Нізкая хуткасць/Абмежаваны бюджэт| D[Прыярытэт слізгальным накіроўвалым]\n C --> E{Падыходжанне са сцэнарыямі прымянення}\n D --> E\n E -->|Дакладная апрацоўка/Электроніка/Робатыка| F[Пацвердзіць лінейныя накіроўвалыя]\n E -->|Цяжкія станкі/Ручное абсталяванне| G[Пацвердзіць слізгальныя накіроўвалыя]\n F --> H{Разлічыць агульны кошт валодання}\n G --> H\n H -->|Доўгатэрміновая эксплуатацыя/Высокая аўтаматызацыя| I[Канчатковы выбар: лінейныя накіроўвалыя]\n H -->|Кароткатэрміновае выкарыстанне/Аднаразовы праект| J[Канчатковы выбар: слізгальныя накіроўвалыя]\n I --> K[Выбар завершаны]\n J --> K", "тэма": "па змаўчанні", "выгляд": "дыяграма"}}, "DC2vfHL4KdRHOlcvrtocuDFVnrf":{"id":"DC2vfHL4KdRHOlcvrtocuDFVnrf", "здымак":{"выраўноўванне":"", "аўтар":"3710198389154762", "дзеці":["MacbfaYs9dkhp0cqKOGcwY1qnSh", "WKnYfULajduRJHcUoHtc1ormnBh", "NZYHf3BAcdoXonctaBIcHkIanoy", «OMSZfXeHhd15JLcIzT4cgQElnkf», «FE5sf7a9ydJOmjcEkvtcIZvMn2H», «JJe0fDKBXdLBWpclH0ecNwNDnLb», «KLf0flTwidAzMucJfpUcqTEFnmc», «WIVKfjuLudyYIVcKv9YcNnZKnKb», «SR9ffi9yxdrve2cupgXcxf7pnzh», «EHkTfSVWmdjZeycvY4rc6odNnpf», «SFuFf1ro8dZbktclz7pcfK5Znsf», «OfHqfd5U4dgqJYcD» OvLccnffnSg", "FZljfZCxUdRQP7ctLgUcJuf1nNS", "OWR7f0zTDdEkUocXGOIcw7cWnZe", "VkAmfqr95d55chcuvebc97onnUd", "EmlqfrYWQdCHqBcpnYucQyAFntd", "Uip9fYJ2od4qtpcLSzJc0O9ynxc", "CRWEfwc4LdPC9HcGcMic4b80nse", "Q7zOfzHrGdp2Rjc5Ia5cY5lhnMf", "Xmv0f7Setdwruhcl2yncq09VnMe", "ZA5 KfeyeBdo7QUcGQCtcax2bnwf", "Q25vf1gaGdD79CcKKUACojwYnxg", "VGtRfDISWdSqCqcN9I3cySZknqf", "Bw4SfdZbHdRZbOcjLUIcSzKUn9b", "XIrMfZuIddMbrTcvu83c9uNYn7b", "SIuKfN0c4dfHSycRCqscl3wZnrc", "IGmOfuCT3dvDyLc9gYwcJ8O4n1g", "LwuBfMnDkdq7xdcXqbQcJqh5nAb", "M9dZfFFThdZwjwcGO4Sc fVX8nac", "UQ33f4mRfdJisScC8frcDLMknYe", "S3i4fcQ8md0KCyc2KZ7c0twzn3f", "EVeofzMrZdeXd1cmamic1VVOnle", "Bb20fQx2Xd7h5IcF30ucXdLJnFo", "ICkYfdKTWdnsKicEOlvcGKTlnWu", "YPvCf30DTdbBDBctd2cclUcXnQb", "KDMkf7pWzdWaPycBEYfcuYNhnud", "NuaJf44lldo7HpcUxEfcwVFCn9f", "MNMFfeC vLdUdkHcl5lJcW9FFnue", "TTxrf9cqtdFZQ7cmueNcYCKWnHg", "NynDfTYtPdSMP9cgMOkc9qLPnSe", "GOWEfdzS2d5GTucHwrzcPEiBnFh", "Ycdufx6H5dNlKgcWboacRdDjnPb", "IHZUf4x3GdLTsJc2cZXcH5JxnEc"], "comment_container_id": "JgBXfu3R4dyGZAcjDnlcgotTnId", "comments":[], "doc_info":{"dele ted_editors":null,"editors":["3710198389154762"],"option_modified":null,"options":["editors","create_time","edit_time"]},"hidden":false,"locked":false,"parent_id":"","revision_container_id":"ReS9fMTOEd7tMwcwJ2NcJRRwnRb","revisions":[],"status":{"струменевая перадача": {"enabled":false,"expired_at":"1763367228","source":1,"operator_id":"3710198389154762"}},"text":{"apool":{"numToAttrib":{"0":["author","3710198389154762"]},"nextNum":1,"attribToNum":{"author,3710198389154762":0}},"initialAttributedTexts":{"text":{"0":"Лінейныя накіроўвалыя супраць слізгальных накіроўвалых: асноўныя адрозненні і выбар Кіраўніцтва"},"attribs":{"0":"*0+1v"},"rows":{},"cols":{}}},"type":"page"}}},"payloadMap":{},"extra":{"channel":"saas","pasteRandomId":"32903089-f853-4d31-9a39-0d49e0fc81d5","mention_page_title":{ }, "external_mention_url":{}}, "isKeepQuoteContainer":false, "selection":[{"id":54, "type":"block", "recordId":"NuaJf44lldo7HpcUxEfcwVFCn9f"}], "pasteFlag": "aa98c37a-1174-4728-be27-dd0ce9c5087d"}">
B{Удакладніць асноўныя патрабаванні}\n B -->|Высокая дакладнасць/Высокачастотны рух/Нізкія эксплуатацыйныя выдаткі| C[Прыярытэт лінейным накіроўвалым]\n B -->|Простае абсталяванне/Цяжкія нагрузкі/Нізкая хуткасць/Абмежаваны бюджэт| D[Прыярытэт слізгальным накіроўвалым]\n C --> E{Падыходжанне са сцэнарыямі прымянення}\n D --> E\n E -->|Дакладная апрацоўка/Электроніка/Робатыка| F[Пацвердзіць лінейныя накіроўвалыя]\n E -->|Цяжкія станкі/Ручное абсталяванне| G[Пацвердзіць слізгальныя накіроўвалыя]\n F --> H{Разлічыць агульны кошт валодання}\n G --> H\n H -->|Доўгатэрміновая эксплуатацыя/Высокая аўтаматызацыя| I[Канчатковы выбар: лінейныя накіроўвалыя]\n H -->|Кароткатэрміновае выкарыстанне/Аднаразовы праект| J[Канчатковы выбар: слізгальныя накіроўвалыя]\n I --> K[Выбар завершаны]\n J --> K", "тэма": "па змаўчанні", "выгляд": "дыяграма"}}, "DC2vfHL4KdRHOlcvrtocuDFVnrf":{"id":"DC2vfHL4KdRHOlcvrtocuDFVnrf", "здымак":{"выраўноўванне":"", "аўтар":"3710198389154762", "дзеці":["MacbfaYs9dkhp0cqKOGcwY1qnSh", "WKnYfULajduRJHcUoHtc1ormnBh", "NZYHf3BAcdoXonctaBIcHkIanoy", «OMSZfXeHhd15JLcIzT4cgQElnkf», «FE5sf7a9ydJOmjcEkvtcIZvMn2H», «JJe0fDKBXdLBWpclH0ecNwNDnLb», «KLf0flTwidAzMucJfpUcqTEFnmc», «WIVKfjuLudyYIVcKv9YcNnZKnKb», «SR9ffi9yxdrve2cupgXcxf7pnzh», «EHkTfSVWmdjZeycvY4rc6odNnpf», «SFuFf1ro8dZbktclz7pcfK5Znsf», «OfHqfd5U4dgqJYcD» OvLccnffnSg", "FZljfZCxUdRQP7ctLgUcJuf1nNS", "OWR7f0zTDdEkUocXGOIcw7cWnZe", "VkAmfqr95d55chcuvebc97onnUd", "EmlqfrYWQdCHqBcpnYucQyAFntd", "Uip9fYJ2od4qtpcLSzJc0O9ynxc", "CRWEfwc4LdPC9HcGcMic4b80nse", "Q7zOfzHrGdp2Rjc5Ia5cY5lhnMf", "Xmv0f7Setdwruhcl2yncq09VnMe", "ZA5 KfeyeBdo7QUcGQCtcax2bnwf", "Q25vf1gaGdD79CcKKUACojwYnxg", "VGtRfDISWdSqCqcN9I3cySZknqf", "Bw4SfdZbHdRZbOcjLUIcSzKUn9b", "XIrMfZuIddMbrTcvu83c9uNYn7b", "SIuKfN0c4dfHSycRCqscl3wZnrc", "IGmOfuCT3dvDyLc9gYwcJ8O4n1g", "LwuBfMnDkdq7xdcXqbQcJqh5nAb", "M9dZfFFThdZwjwcGO4Sc fVX8nac", "UQ33f4mRfdJisScC8frcDLMknYe", "S3i4fcQ8md0KCyc2KZ7c0twzn3f", "EVeofzMrZdeXd1cmamic1VVOnle", "Bb20fQx2Xd7h5IcF30ucXdLJnFo", "ICkYfdKTWdnsKicEOlvcGKTlnWu", "YPvCf30DTdbBDBctd2cclUcXnQb", "KDMkf7pWzdWaPycBEYfcuYNhnud", "NuaJf44lldo7HpcUxEfcwVFCn9f", "MNMFfeC vLdUdkHcl5lJcW9FFnue", "TTxrf9cqtdFZQ7cmueNcYCKWnHg", "NynDfTYtPdSMP9cgMOkc9qLPnSe", "GOWEfdzS2d5GTucHwrzcPEiBnFh", "Ycdufx6H5dNlKgcWboacRdDjnPb", "IHZUf4x3GdLTsJc2cZXcH5JxnEc"], "comment_container_id": "JgBXfu3R4dyGZAcjDnlcgotTnId", "comments":[], "doc_info":{"dele ted_editors":null,"editors":["3710198389154762"],"option_modified":null,"options":["editors","create_time","edit_time"]},"hidden":false,"locked":false,"parent_id":"","revision_container_id":"ReS9fMTOEd7tMwcwJ2NcJRRwnRb","revisions":[],"status":{"струменевая перадача": {"enabled":false,"expired_at":"1763367228","source":1,"operator_id":"3710198389154762"}},"text":{"apool":{"numToAttrib":{"0":["author","3710198389154762"]},"nextNum":1,"attribToNum":{"author,3710198389154762":0}},"initialAttributedTexts":{"text":{"0":"Лінейныя накіроўвалыя супраць слізгальных накіроўвалых: асноўныя адрозненні і выбар Кіраўніцтва"},"attribs":{"0":"*0+1v"},"rows":{},"cols":{}}},"type":"page"}}},"payloadMap":{},"extra":{"channel":"saas","pasteRandomId":"8134ad9d-2d0a-4c6a-bfdf-76f4fb4939ee","mention_page_title":{},"external_mention_url":{}},"isKeepQuoteContainer":false,"selection":[{"id":54,"type":"block","recordId":"NuaJf44lldo7HpcUxEfcwVFCn9f"}],"pasteFlag":"aa98c37a-1174-4728-be27-dd0ce9c5087d"}">
 EN
EN
 AR
AR
 BG
BG
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 ID
ID
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 SW
SW
 GA
GA
 CY
CY
 BE
BE
 KA
KA
 LA
LA
 MY
MY
 TG
TG
 UZ
UZ